bencobley.com

Hey, I'm Ben!
I am a technologist, designer & maker. This site is a record of my projects and work. I'm starting a new role soon, stay tuned!
I studied Design Engineering at Imperial College, where I developed cooking robots and medical devices [amongst other things!].
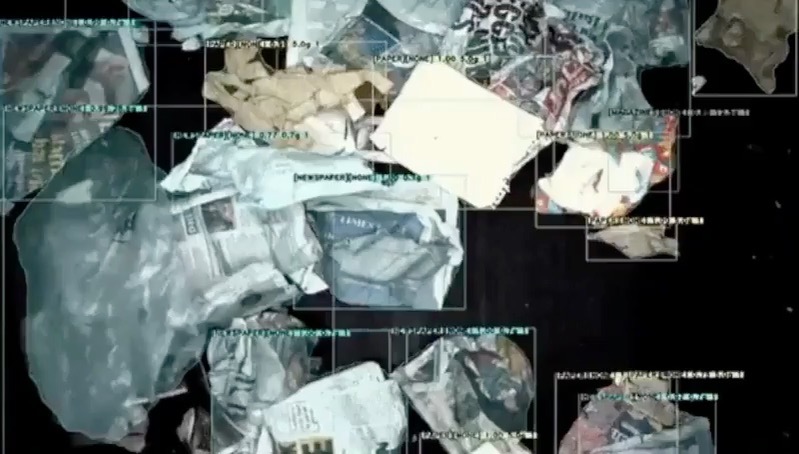
During the degree, interned at Google X, Dyson & Brompton. I got to join some great projects. More recently, I worked on the world's waste problem at TrueCircle.
Outside work, I love making things with friends. I am currently taking some time off to travel in the van I converted, but I'm always available to chat. Say hello!.